https://www.souichi.club/raspberrypi/servomotor/に差し替え予定
GPIOピンに接続
秋月電子通商の商品紹介ページによると、
動作電圧:4.8~6V、
配線:茶=GND、赤=電源[+]、橙=制御信号
だそうです。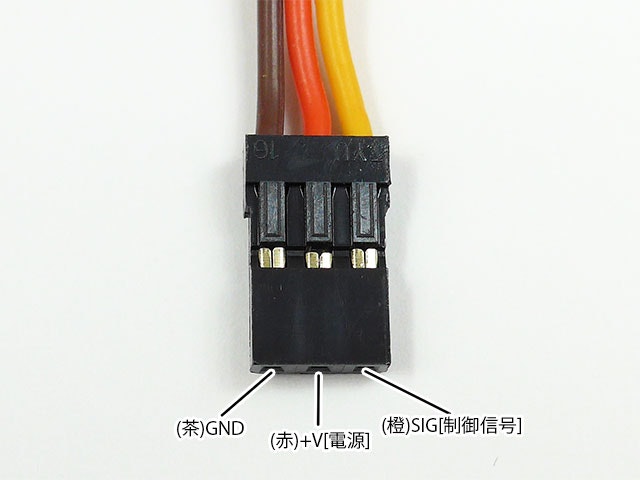
なので茶色をGND、赤を5V、黄色を4番あたりに繋いで制御パルス用に用います。
プログラム
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM)
#GPIO4を制御パルスの出力に設定
gp_out = 4
GPIO.setup(gp_out, GPIO.OUT)
#「GPIO4出力」でPWMインスタンスを作成する。
#GPIO.PWM( [ピン番号] , [周波数Hz] )
#SG92RはPWMサイクル:20ms(=50Hz), 制御パルス:0.5ms〜2.4ms, (=2.5%〜12%)。
servo = GPIO.PWM(gp_out, 50)
#パルス出力開始。 servo.start( [デューティサイクル 0~100%] )
#とりあえずゼロ指定だとサイクルが生まれないので特に動かないっぽい?
servo.start(0)
#time.sleep(1)
for i in range(3):
#デューティサイクルの値を変更することでサーボが回って角度が変わる。
servo.ChangeDutyCycle(2.5)
time.sleep(0.5)
servo.ChangeDutyCycle(7.25)
time.sleep(0.5)
servo.ChangeDutyCycle(12)
time.sleep(0.5)
servo.ChangeDutyCycle(7.25)
time.sleep(0.5)
servo.stop()
GPIO.cleanup()
0 件のコメント:
コメントを投稿